Работа с ROS из браузера
С помощью библиотеки roslibjs возможна работа со всеми ресурсами ROS (топики, сервисы, параметры) из JavaScript-кода внутри браузера, что позволяет создавать различные интерактивные браузерные приложения для коптера.
Пример
Пример HTML-кода страницы, работающей с roslib.js:
<html>
<script src="js/roslib.js"></script>
<script type="text/javascript">
// Establish roslibjs connection
var ros = new ROSLIB.Ros({ url: 'ws://' + location.hostname + ':9090' });
ros.on('connection', function () {
// Connection callback
alert('Connected');
});
// Declare get_telemetry service client
var getTelemetry = new ROSLIB.Service({ ros: ros, name : '/get_telemetry', serviceType : 'drone/GetTelemetry' });
// Call get_telemetry
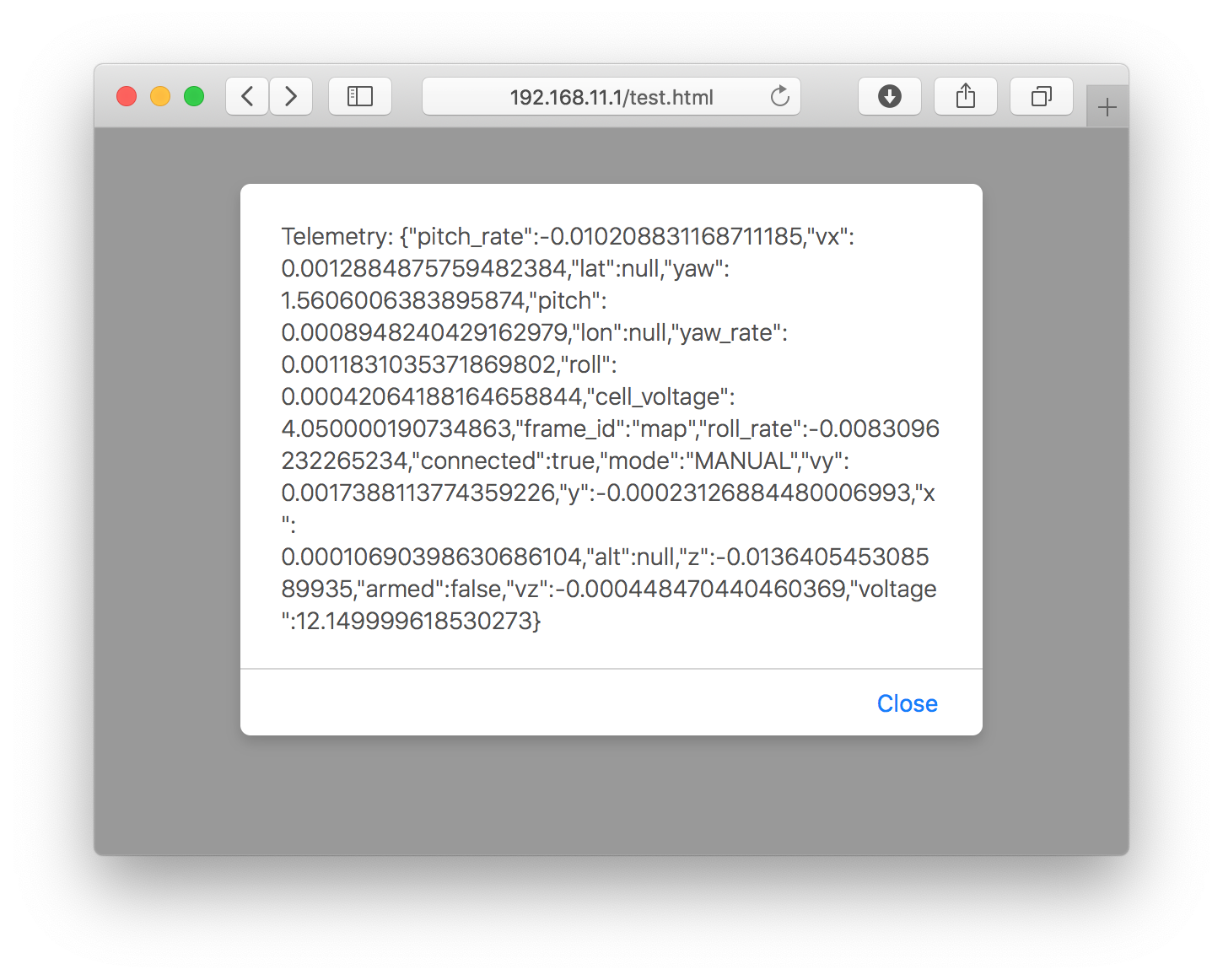
getTelemetry.callService(new ROSLIB.ServiceRequest({ frame_id: 'map' }), function(result) {
// Service respond callback
alert('Telemetry: ' + JSON.stringify(result));
});
// Subscribe to `/mavros/state` topic
var stateSub = new ROSLIB.Topic({ ros : ros, name : '/mavros/state', messageType : 'mavros_msgs/State' });
stateSub.subscribe(function(msg) {
// Topic message callback
console.log('State: ', msg);
});
</script>
</html>
Более подробную информацию смотрите в туториале по roslibjs.